Related Work
Wenzhen Yuan, Siyuan Dong, and Edward H. Adelson
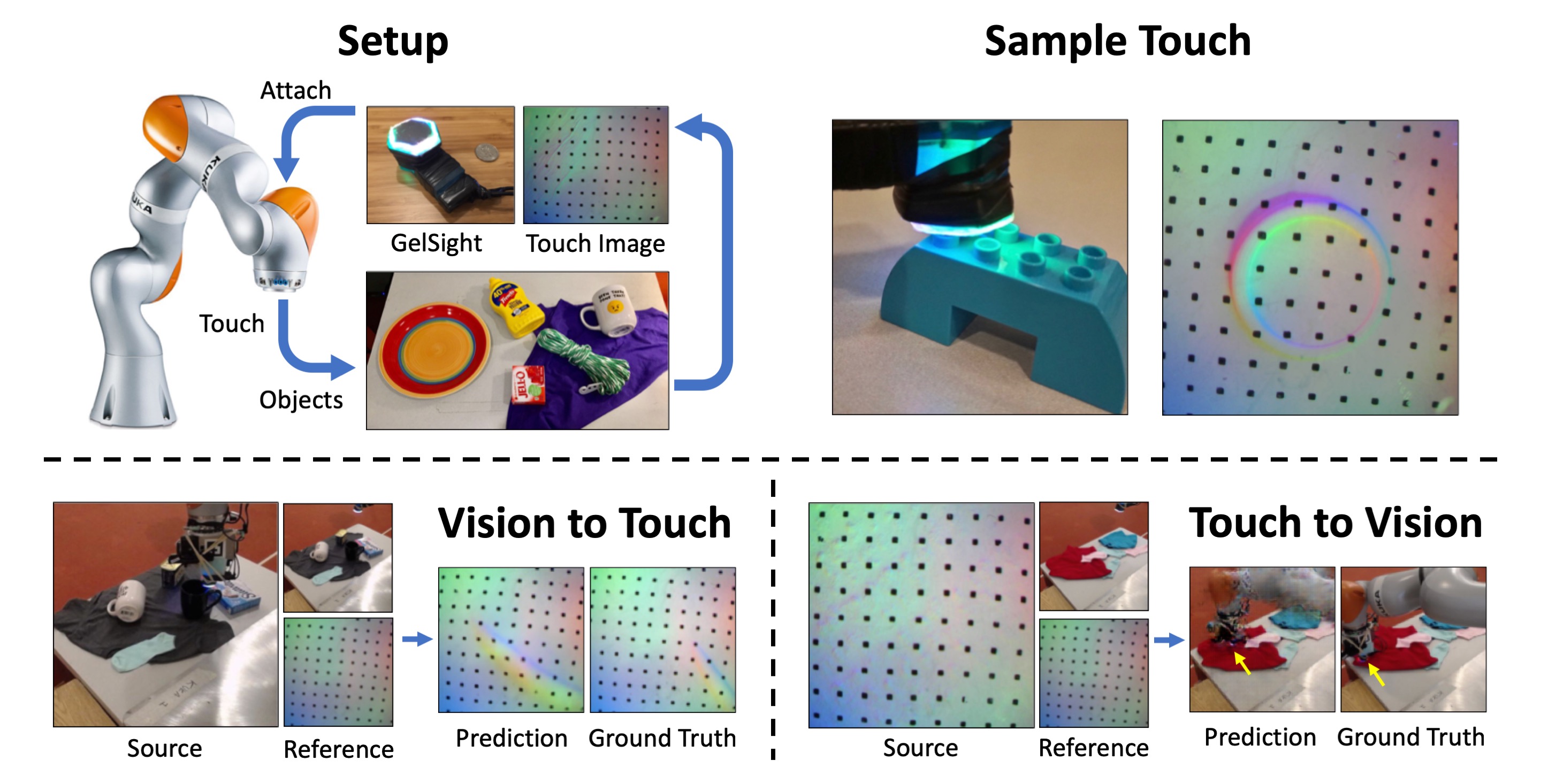
GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force
Sensors, 2017
Wenzhen Yuan, Shaoxiong Wang, Siyuan Dong, and Edward H. Adelson
Connecting look and feel: Associating the visual and tactile properties of physical materials
CVPR 2017
Roberto Calandra, Andrew Owens, Manu Upadhyaya, Wenzhen Yuan, Justin Lin, Edward H. Adelson, Sergey Levine
The Feeling of Success: Does Touch Sensing Help Predict Grasp Outcomes?
CoRL 2017
Shaoxiong Wang*, Jiajun Wu*, Xingyuan Sun, Wenzhen Yuan, William T. Freeman, Joshua B. Tenenbaum, and Edward H. Adelson
3D Shape Perception from Monocular Vision, Touch, and Shape Priors
IROS 2018
Subramanian Sundaram, Petr Kellnhofer, Yunzhu Li, Jun-Yan Zhu, Antonio Torralba, and Wojciech Matusik
Learning the Signatures of the Human Grasp Using a Scalable Tactile Glove
Nature, 569 (7758), 2019